Cycling Wheelchair type Mobility Assistance Robot

本研究では,制動時にモータ軸を回転させることで生じる運動エネルギを電源系統等の別用途に再利用可能な特徴を持つ回生ブレーキをシステムに適用して,利用者の運動動作に対してブ...
続きを読むPassive Robot Porters -PRP-
本研究では,駆動力を持たない物体搬送システムの実現を目的とし,パッシブ型搬送ロボット”PRP(Passive Robot Porter)”を開発した.PRPは力センサ,全...
続きを読むCaster type Passive Robot Porter -C-PRP-

本研究では,大型物体や長尺物を安全に,かつ少人数で搬送することが出来るシステムを実現することを目的とし,4つのブレーキ付きキャスタを有するパッシブ型の移動ベースを開発した...
続きを読むA Mobile Robot Platform Using Double-Wheel Caster Units Based on the Servo Brake Control
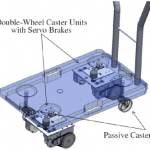
キャスタは実生活において様々な物体の移動に広く利用されており,全方向移動を可能にするホロノミックな構造を持ち,移動時の低振動,高耐荷重,優れた段差走破性などの特徴がある....
続きを読むRT Walker

本研究では,歩行に関して何らかの障害を持つ人の支援のために,サーボブレーキを利用したパッシブ型知的歩行支援システム“RT Walker”(Robot Technology...
続きを読むCooperative Walking Support System -IP Cane-
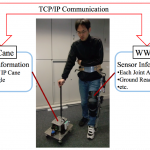
本研究では,高齢者や身体障害者の支援を目的として装着型歩行支援システムと杖型歩行支援システムの連携により支援を実現する協調型歩行支援システムを提案する.本システムでは,使...
続きを読むMotion Control of Cycling Wheelchair for Hemiplegia Patients

本研究では,片麻痺(半身不随)患者でも足漕ぎ車椅子を利用できるパワーアシスト制御手法を提案した.患脚を人体リンクモデルとして近似し,患脚が健脚と同様にクランクにトルクを加...
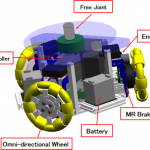
続きを読むOmni-directional Walking Helper

本研究では,高齢者や障害者の自立支援を目的とし,全方向移動型歩行支援機器“Walking Helper”を開発した.Walking Helperは利用者の体重を支えるフレ...
続きを読むSit to Stand Assistance based on a Human Model
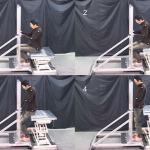
本研究では,離床動作のうちの立ち上がり動作に着目し,利用者とシステムの相互作用を通じて,利用者に適した立ち上がり支援を実現するシステムの構築を目指す.本研究においては利用...
続きを読むMultiple Mobile Manipulators Coordination
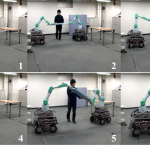
本研究では,全方向移動ベースに7自由度マニピュレータを搭載した人間協調型モバイルマニピュレータを開発した.そして,複数のモバイルマニピュレータと人間が協調し,人間が物体に...
続きを読むCoordinate Transportation of a Single Object by Passive Robot Porters

本研究では,パッシブロボティクスの概念に基づいて,サーボブレーキを用いずにシステムに加わる外力に基づいて受動的に動作するパッシブ型搬送ロボット“PRP (Passive ...
続きを読む平成28年度パッシブロボティクスが拓く下肢障がい者アクティブ運動支援機開発補助事業
本研究は競輪(28-133)の補助を受けて実施しました.研究概要本研究では,下肢障がい者や下肢筋力の衰えた高齢者であっても,自らの脚を用いて屋内外問わず移...
続きを読む平成30年度 高齢者が安心して乗ることができる転倒しない三輪アシスト自転車研究開発 補助事業
本研究は競輪(2018M-160)の補助を受けて実施しました.研究概要本研究では,下肢の衰えやバランス機能の衰えから自転車に乗ることをやめてしまった高齢者...
続きを読む