未来社会を創るAIロボティクス活力ある社会を創る適応自在AIロボット群(内閣府ムーンショット型研究開発事業)
内閣府が主導するムーンショット型研究開発事業に参画し,205
人・環境適応型マルチロボティクス

一台のロボットではできないことも,複数台のロボットが協力すれば,様々なことが実現できるようになります.本研究では,介護施設において複数のロボットを協調運用し,必要なときに適切なロボットが他のロボットや介護士と協力して支援を提供する未来の介護施設を提案します.また,洋上風力発電所等のメンテナンスに対応できる複数ロボット協調システムを研究開発していきます.
-

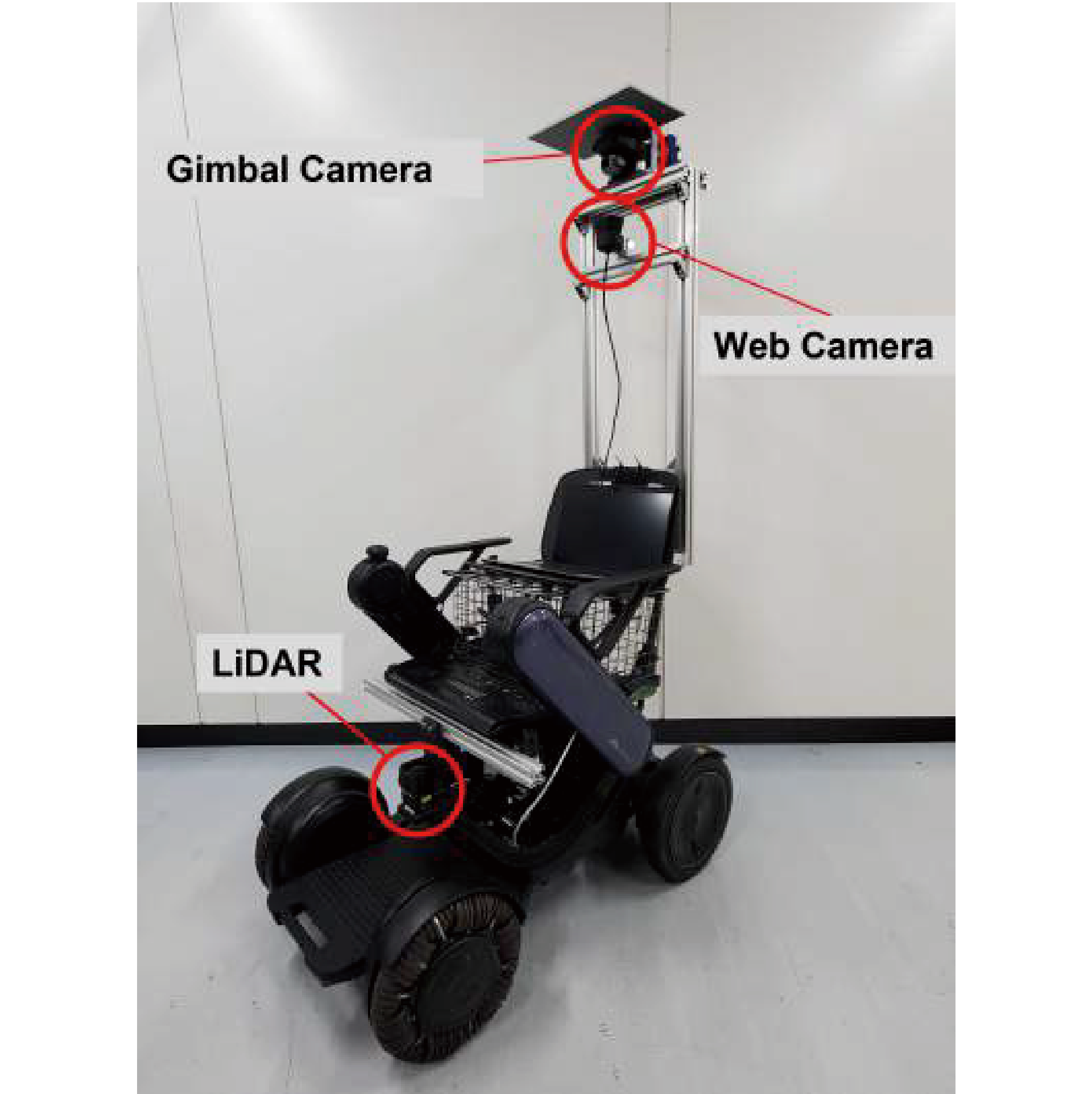
福祉用具の搬送を実現する自律走行ロボット
-

寄り添い型歩行支援ロボット
-

複合現実技術を用いた介護動作教示システム
リビングラボを通した産学官連携

介護ロボットの開発・実証・普及のプラットフォーム構築事業」において,介護ロボットの評価・効果検証を実施するリビングラボを東北大学青葉山キャンパスに設立しました.このリビングラボを通して,産学官連携を進めるとともに,ムーンショットプロジェクトとも連携し,介護ロボットの開発・実証・普及の流れを加速化することを目指します.
-
団体競技のコーチングを目的としたウェアラブル振動触覚デバイス
-
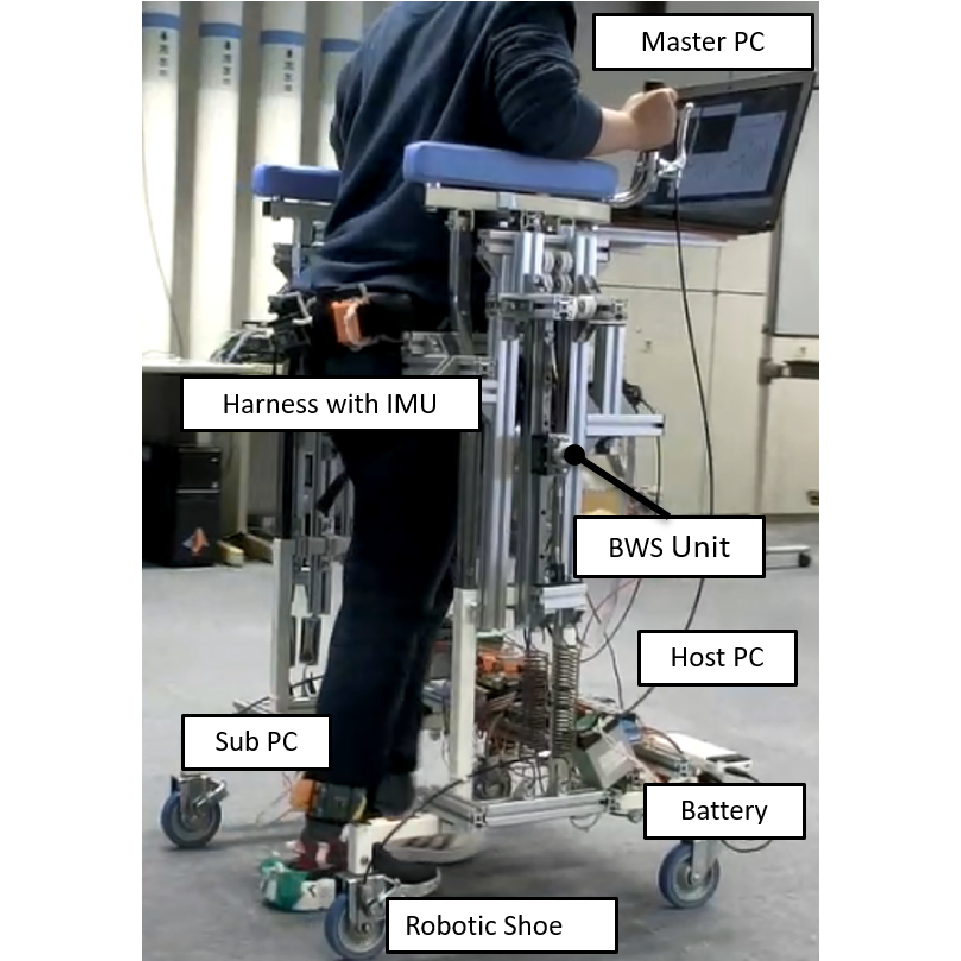
体重免荷型歩行訓練ロボット
-
アバターロボットによる没入型バーチャルウォーキング
-
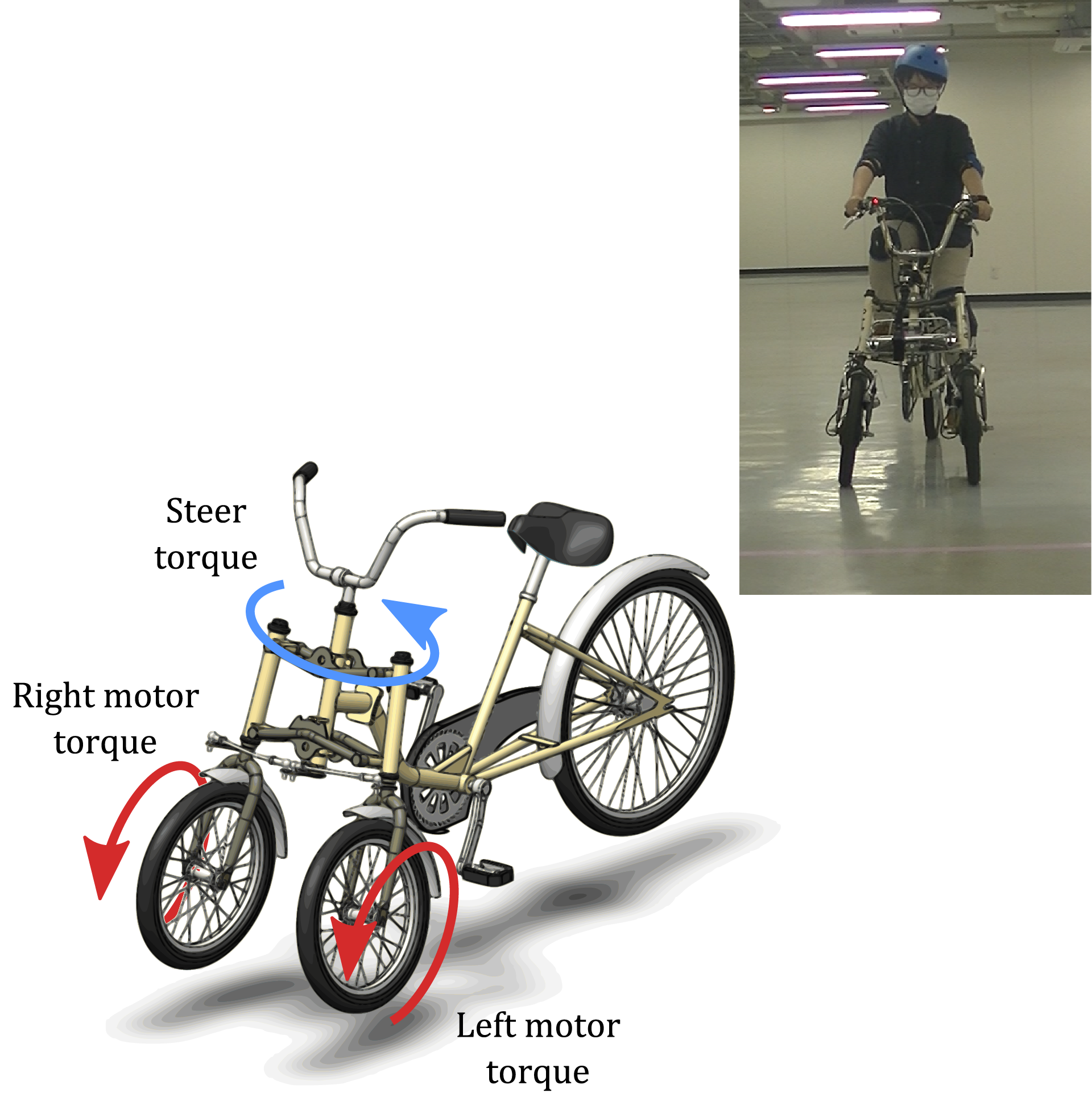
スウィング型三輪自転車
デジタルツイン技術と双腕ロボットを用いた次世代モノづくり革新
柔軟物ハンドリングをシミュレーションする技術と,その結果に基づいて双腕ロボットによる柔軟物ハンドリングを実現する技術を構築し,衣類製造用に革新を起こす次世代産業用ロボットを開発します.また,CFRPを用いて軽量・高強度部品を3Dプリンティングするためのシミュレーション技術と,複雑形状部品を印刷可能な双腕ロボットを利用した次世代3Dプリンタを研究開発します.
-
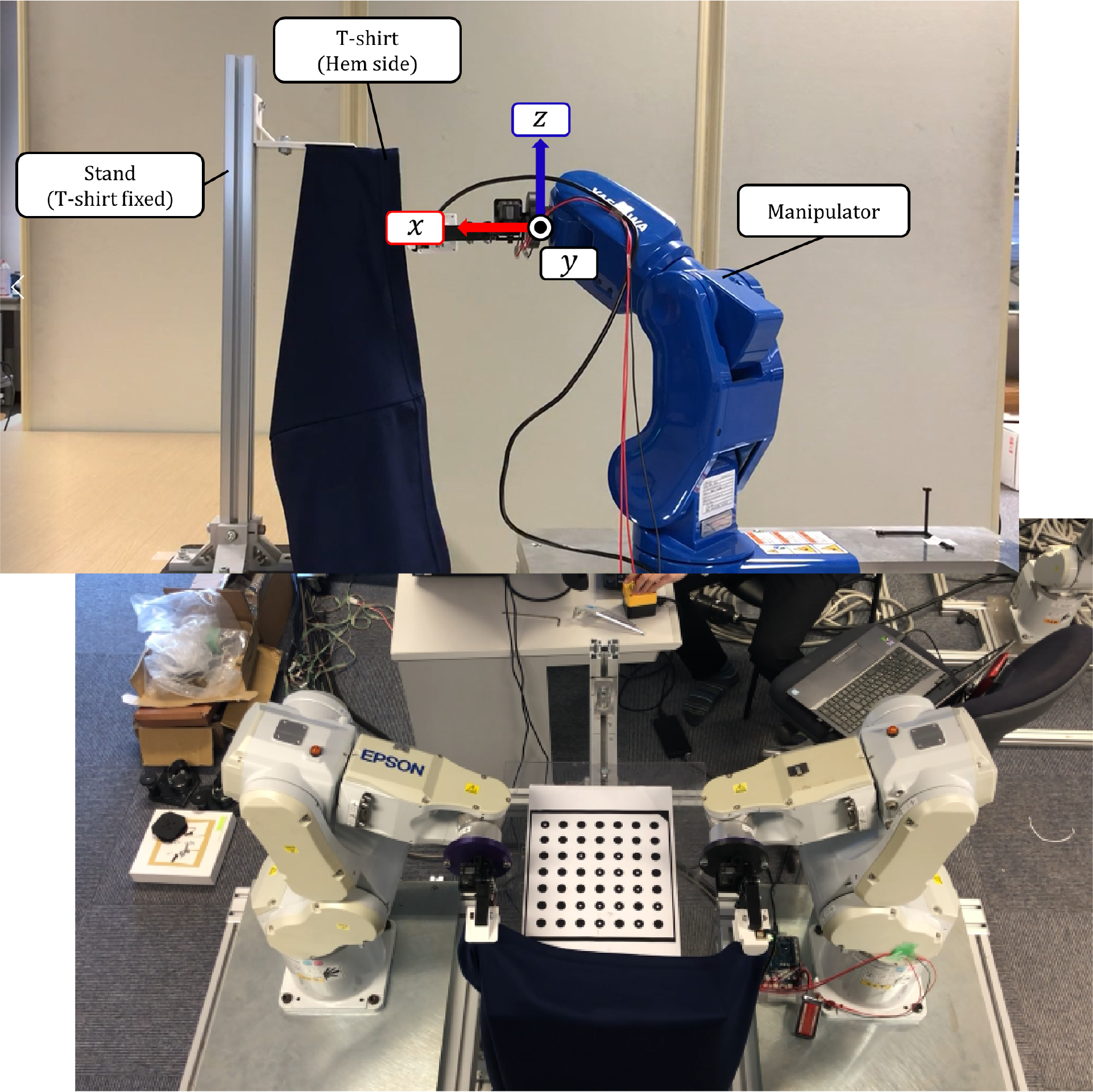
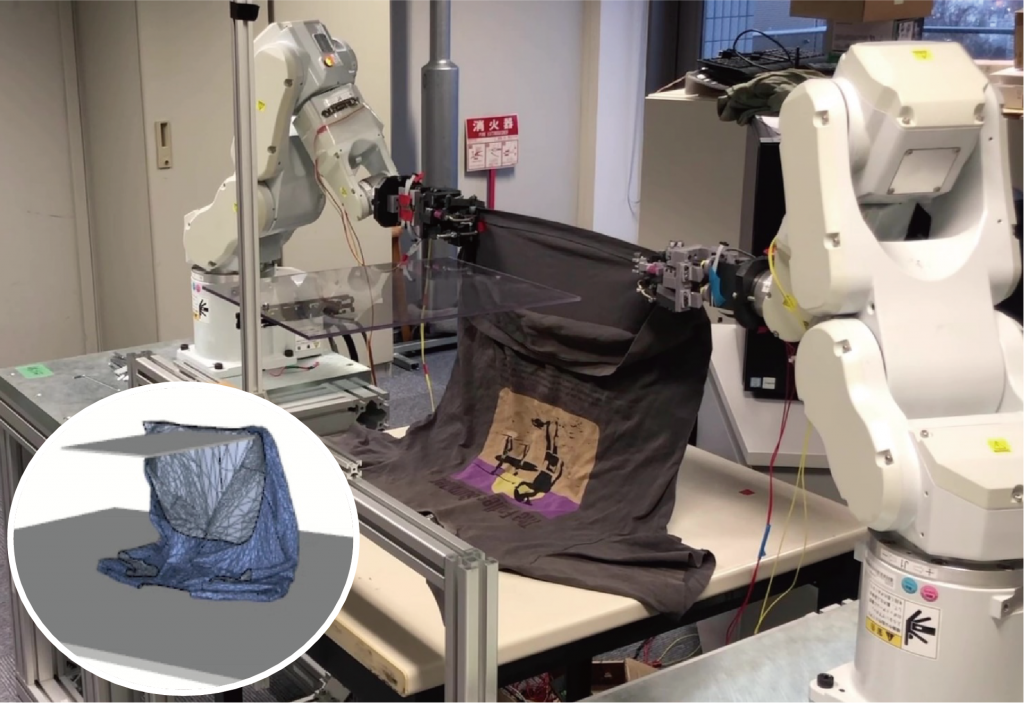
双腕マニピュレータを用いた衣類ハンドリング
-
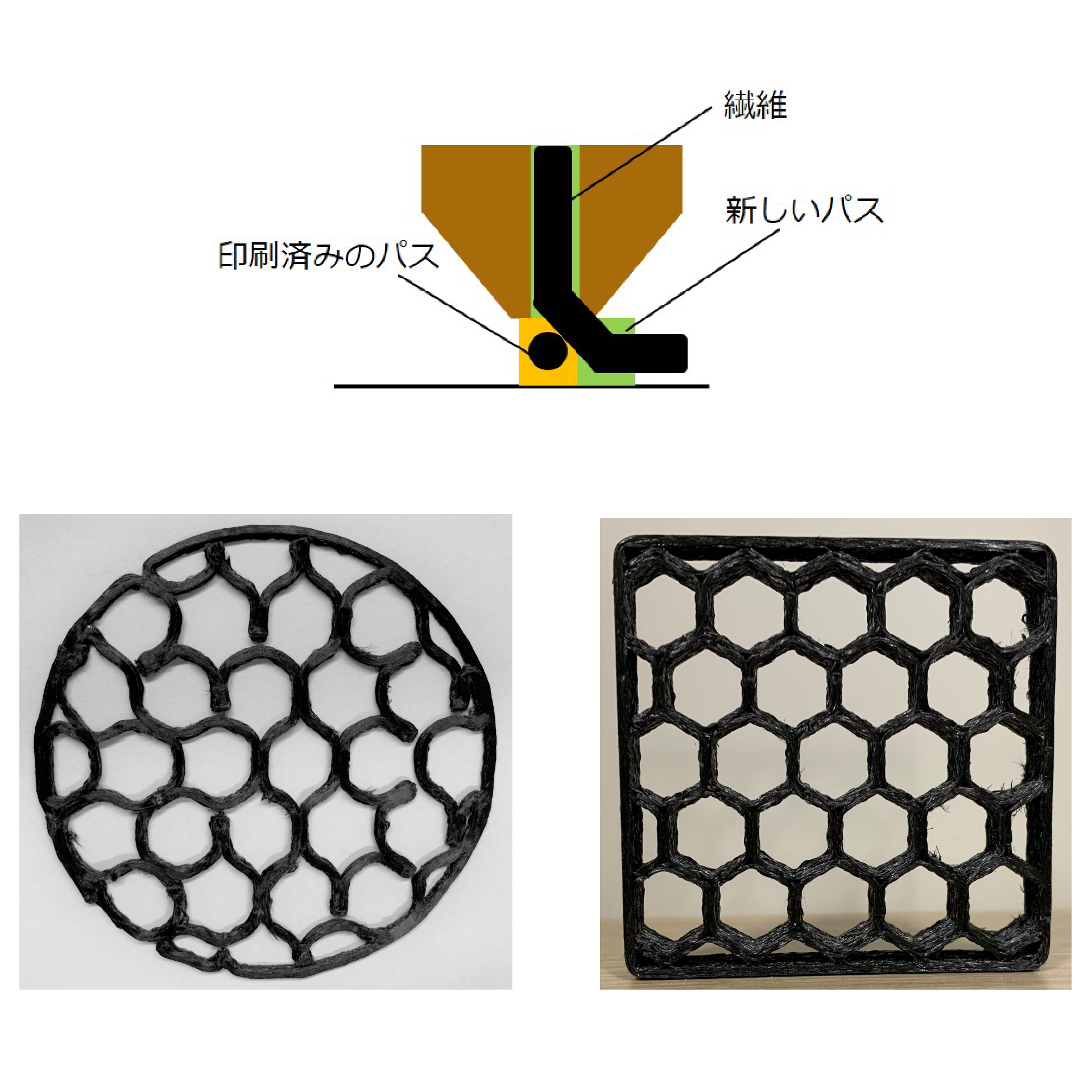
連続繊維複合材を用いた 3D プリンタ