We have developed passive robots’ motion control technology for robotic walkers, cycling wheelchair robots, object transportation robots (i.e. mobility cart system), as well as haptic systems that can be used for rehabilitation, sports training, and virtual reality. Besides, we are also conducting research in estimating the user’s state and motion intention by measuring user’s motion in real time.
Cooperative Walking Support System -IP Cane-
In this study, we have proposed a walking support system based on the cooperation bet…
Read moreCycling Wheelchair type Mobility Assistance Robot

This study focuses on regenerative brake that it is possible to reuse converting kine…
Read moreMotion Control of Cycling Wheelchair for Hemiplegia Patients

We proposed a power assist control method, which allows people with hemiplegia (paral…
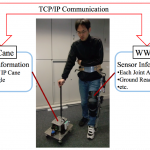
Read moreWearable Support System WALK II

In this study, we have proposed a wearable walking support system, referred to as WAL…
Read moreHUMAN STATE ESTIMATION FOR ASSISTIVE ROBOTS USING A SMALL NUMBER OF SENSORS

In this study, we propose a method to estimate the user's state utilizing a few…
Read more