SI 2024
At the 25th Annual Conference of the Systems Integration Division, The Society of Instrument and Control Engineers (SI 2024), held at Aiina Iwate Prefectural Information Exchange Center from December 18 (Wed) to December 20 (Fri), 2024, our laboratory presented eight research papers.
The presentation titles are as follows:
3A7-08 Work Support in Nursing Facilities Using Robots with Large Language Models
- Shintaro Nakano(Tohoku Univ.)
- Shu Yamamoto(Tohoku Univ.)
- Salazar Jose(Tohoku Univ.)
- Ravankar Ankit(Tohoku Univ.)
- Yasuhisa Hirata(Tohoku Univ.)
1D6-04 Garment Handling by Dual Manipulators with Diffusion Planning
- He Weizan(Tohoku Univ.)
- Chen Dayuan(Tohoku Univ.)
- Petrilli-Barcel´o Alberto, El´ıas(Tohoku Univ.)
- Salazar Luces Jose, Victorio(Tohoku Univ.)
- Yasuhisa Hirata(Tohoku Univ.)
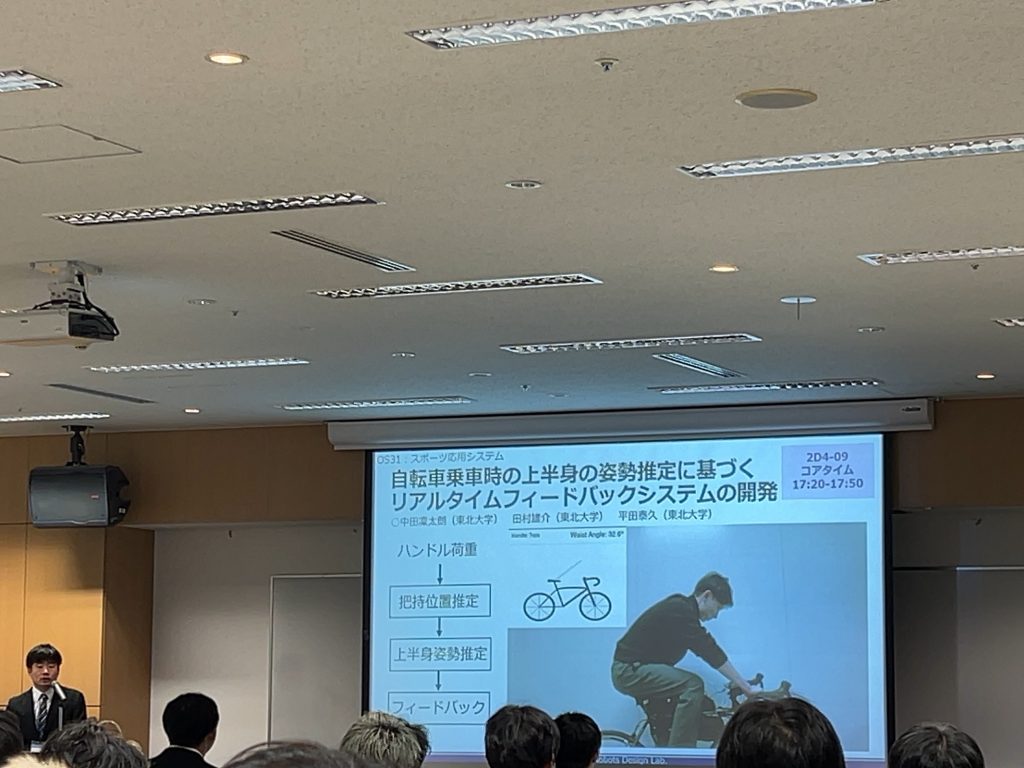
2D4-09 Development of a real-time feedback system based on upper body posture estimation during bicycle riding
- Rintaro Nakada(Tohoku Univ.)
- Yusuke Tamura(Tohoku Univ.)
- Yasuhisa Hirata(Tohoku Univ.)
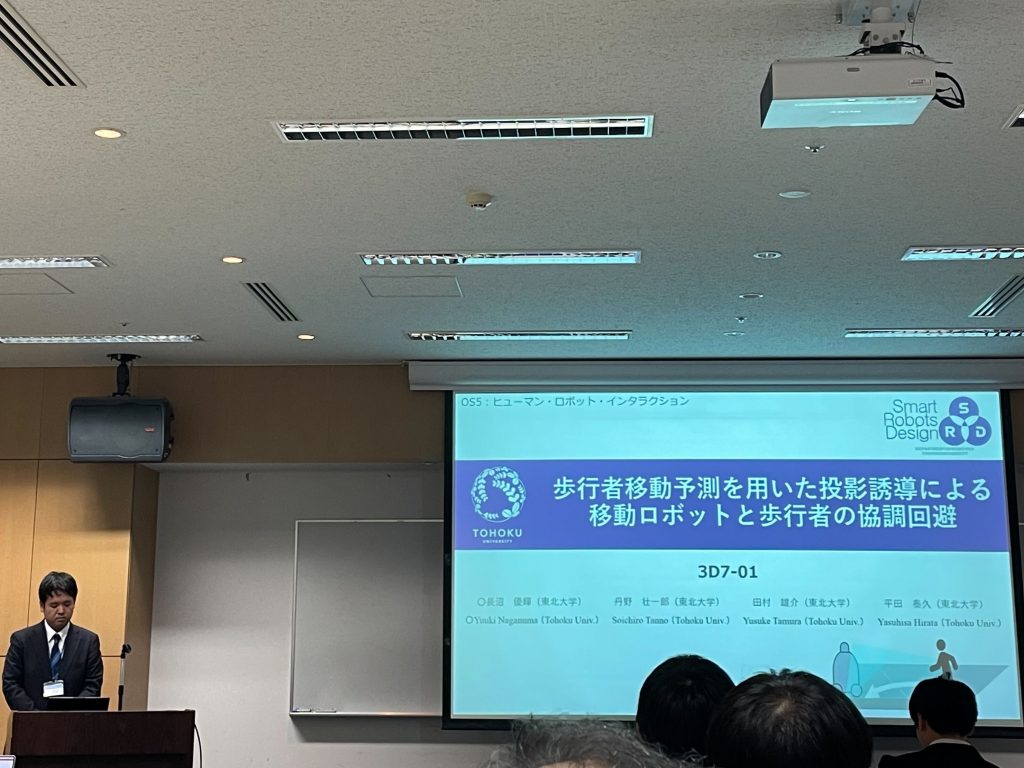
3D7-01 Cooperative Avoidance between a mobile robot and a pedestrian by Projection Guidance Using Pedestrian Movement Prediction
- Yuki Naganuma(Tohoku Univ.)
- Soichiro Tanno(Tohoku Univ.)
- Yusuke Tamura(Tohoku Univ.)
- Yasuhisa Hirata(Tohoku Univ.)
2E1-10 Radiation Source Exploration in Unknown Environments by Multiple Mobile Robots
- Kueili Chen(Tohoku Univ.)
- Yusuke Tamura(Tohoku Univ.)
- Yasuhisa Hirata(Tohoku Univ.)

3E2-01 Development of Road Marking Application System and SprayWidth Adjustment Mechanism Using Autonomous Mobile Robot
- Yuto Dai(Tohoku Univ.)
- Naho Omori(Tohoku Univ.)
- Salazar Jose(Tohoku Univ.)
- Ravankar Ankit(Tohoku Univ.)
- Yukito Mizutani(Tohoku Sankei Corp.)
- Kohichiro Higashi(Atomix Corp.)
- Takayuki Utsunomiya(Atomix Corp.)
- Yasuhisa Hirata(Tohoku Univ.)
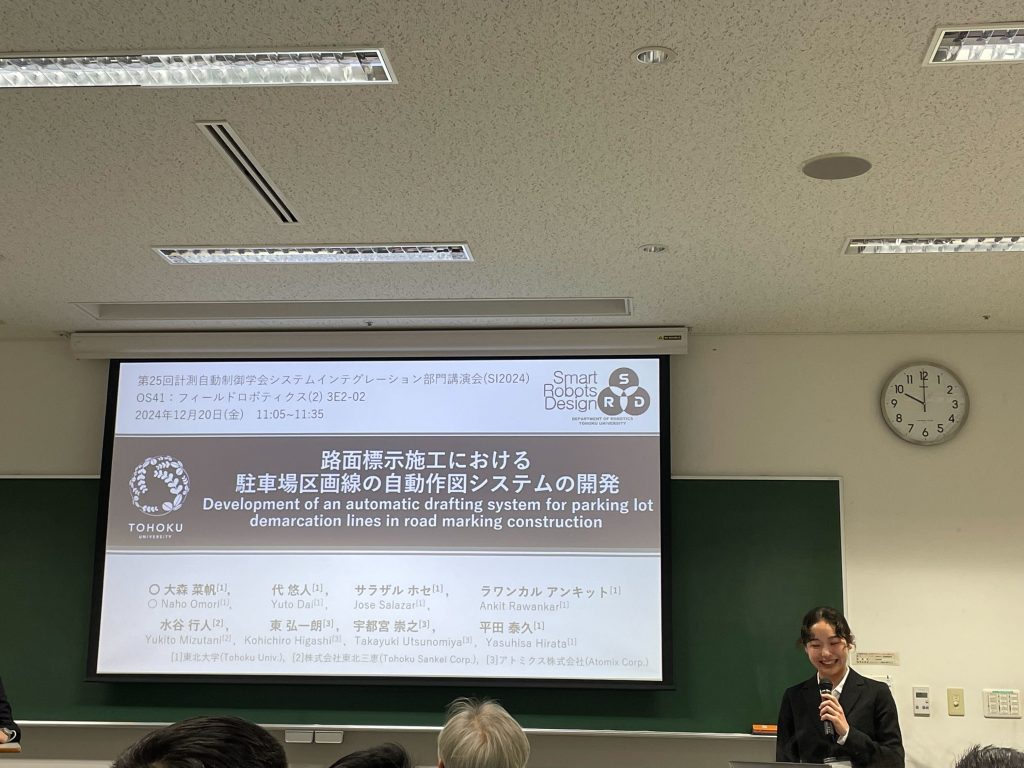
3E2-02 Development of an automatic drafting system for parking lot demarcation lines in road marking construction
- Naho Omori(Tohoku Univ.)
- Yuto Dai(Tohoku Univ.)
- Salazar Jose(Tohoku Univ.)
- Ravankar Ankit(Tohoku Univ.)
- Yukito Mizutani(Tohoku Sankei Corp.)
- Kohichiro Higashi(Atomix Corp.)
- Takayuki Utsunomiya(Atomix Corp.)
- Yasuhisa Hirata(Tohoku Univ.)
3E2-06 Delopment of a lifting system with coordinated control of multiple drones for offshore wind turbine inspection
- Fuma Hosoda(Tohoku Univ.)
- Yasuhisa Hirata(Tohoku Univ.)