ROBOMECH2024
2024年5月29日(水)~6月1日(土)にライトキューブ宇都宮で開催されましたロボティクス・メカトロニクス 講演会 2024(ROBOMECH2024)にて,当研究室より8件の発表を行いました.
各発表題目は以下の通りです.
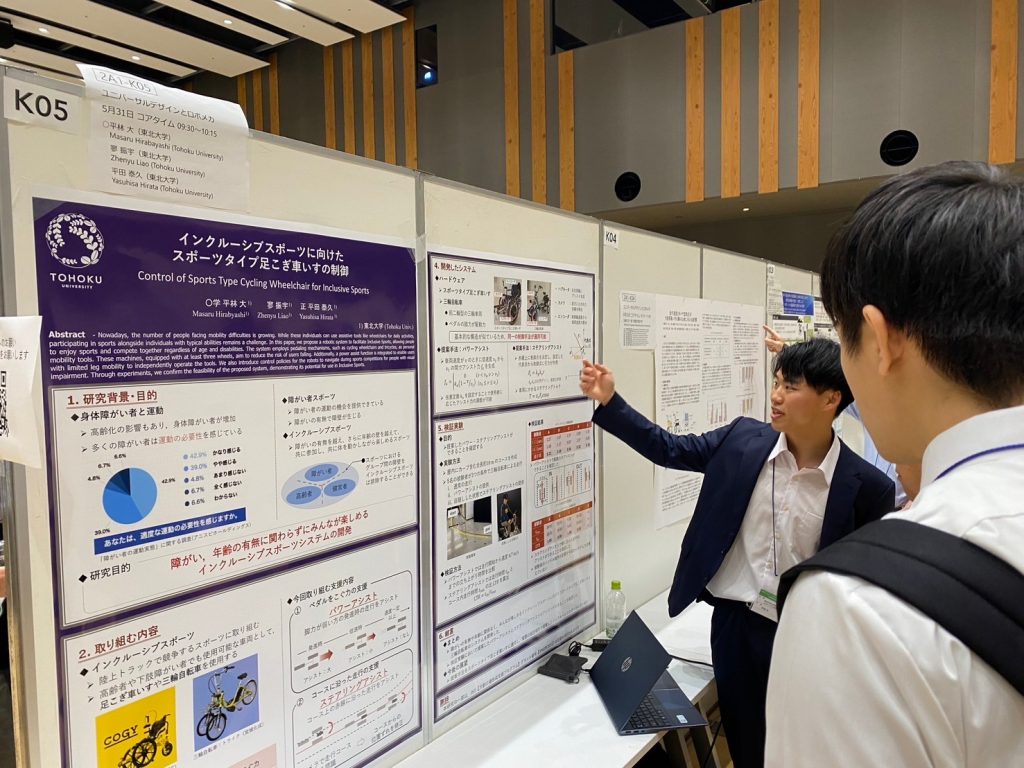
2A1-K05 インクルーシブスポーツに向けたスポーツタイプ足こぎ車いすの制御
- 平林大(東北大)
- 廖振宇(東北大)
- 平田泰久(東北大)
2A2-I05 レール型歩行支援システムにおける経路切り替えのための無線IMUを用いた進行方向推定
- 村瀬翔太(東北大)
- マンケリス・リカード(東北大)
- タシフリ・セイエド アミル(東北大)
- ラワンカル・アンキット(東北大)
- サラザル・ホセ(東北大)
- 平田泰久(東北大)
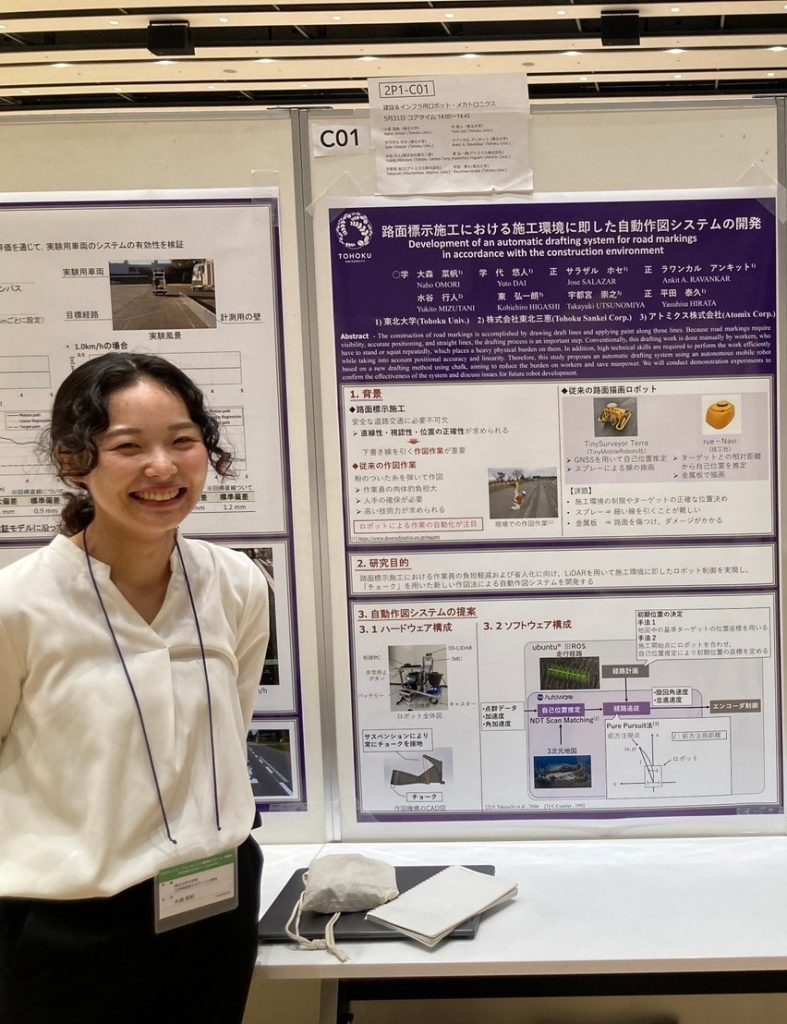
2P1-C01 路面標示施工における施工環境に即した自動作図システムの開発
- 大森菜帆(東北大)
- 代悠人(東北大)
- サラザル・ホセ(東北大)
- ラワンカル・アンキット(東北大)
- 水谷行人(株式会社東北三恵)
- 東弘一朗(アトミクス株式会社)
- 宇都宮崇之(アトミクス株式会社)
- 平田泰久(東北大)
2P1-C02 自律移動ロボットによる路面標示の自動塗布システムの開発
- 代悠人(東北大)
- 大森菜帆(東北大)
- サラザル・ホセ(東北大)
- ラワンカル・アンキット(東北大)
- 水谷行人(株式会社東北三恵)
- 東弘一朗(アトミクス株式会社)
- 宇都宮崇之(アトミクス株式会社)
- 平田泰久(東北大)
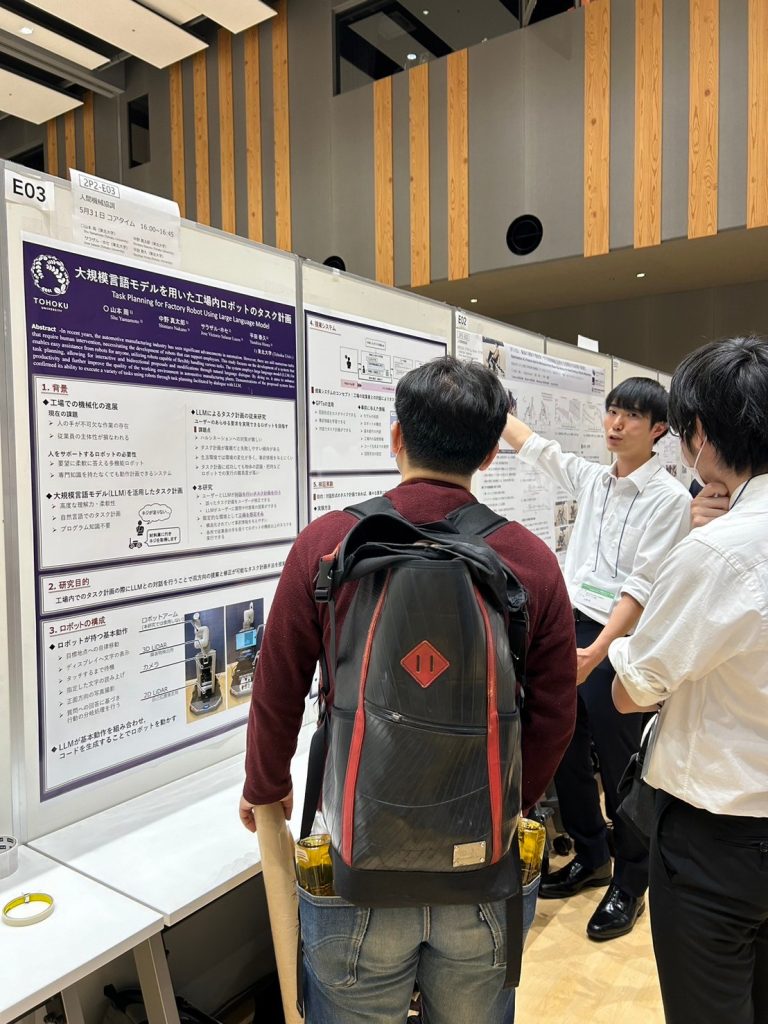
2P2-E03 大規模言語モデルを用いた工場内ロボットのタスク計画
- 山本周(東北大)
- 中野真太郎(東北大)
- サラザル・ホセ(東北大)
- 平田泰久(東北大)
2P2-N01 不確実性を考慮した歩行者軌道予測への姿勢情報の統合
- 只野竣也(東北大)
- 田村雄介(東北大)
- 平田泰久(東北大)
2P1-O08 Topo-metric navigation of service robots using semantic features
- Ankit Ravankar(Tohoku Univ.)
- Abhijeet Ravankar(Kitami I.T.)
- Jose Victorio Salazar Luces(Tohoku Univ.)
- Yasuhisa Hirata(Tohoku Univ.)

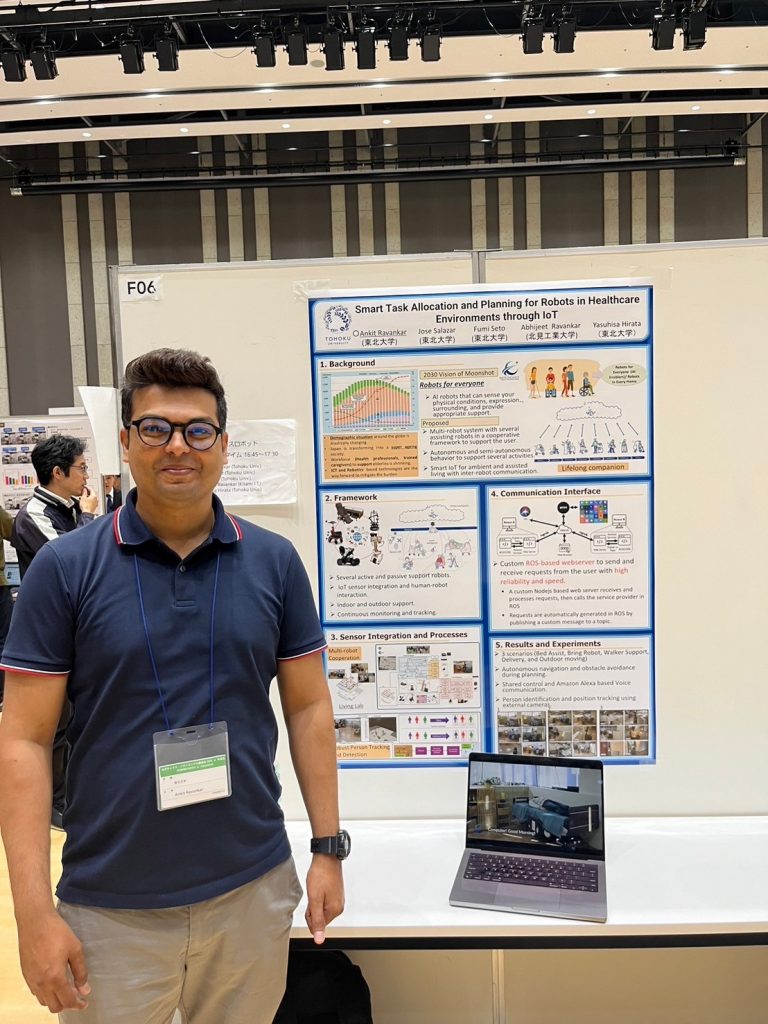
2P2-F06 Smart Task Allocation and Planning for Robots in Healthcare Environments through IoT
- Ankit Ravankar(Tohoku Univ.)
- Jose Victorio Salazar Luces(Tohoku Univ.)
- Fumi Seto(Tohoku Univ.)
- Abhijeet Ravankar(Kitami I.T.)
- Yasuhisa Hirata(Tohoku Univ.)