ICRA2024
2024年5月13日(月)~5月17日(木)にパシフィコ横浜で開催されました2024 IEEE International Conference on Robotics and Automation(ICRA2024)にて,当研究室より1件の基調講演と10件の発表を行いました.また,平田教授がプロジェクトマネージャーを務める研究開発プロジェクト「活力ある社会を創る適応自在AIロボット群」を含むムーンショットプロジェクト目標3のブース出展が行われました.
各発表題目は以下の通りです.
Presentation
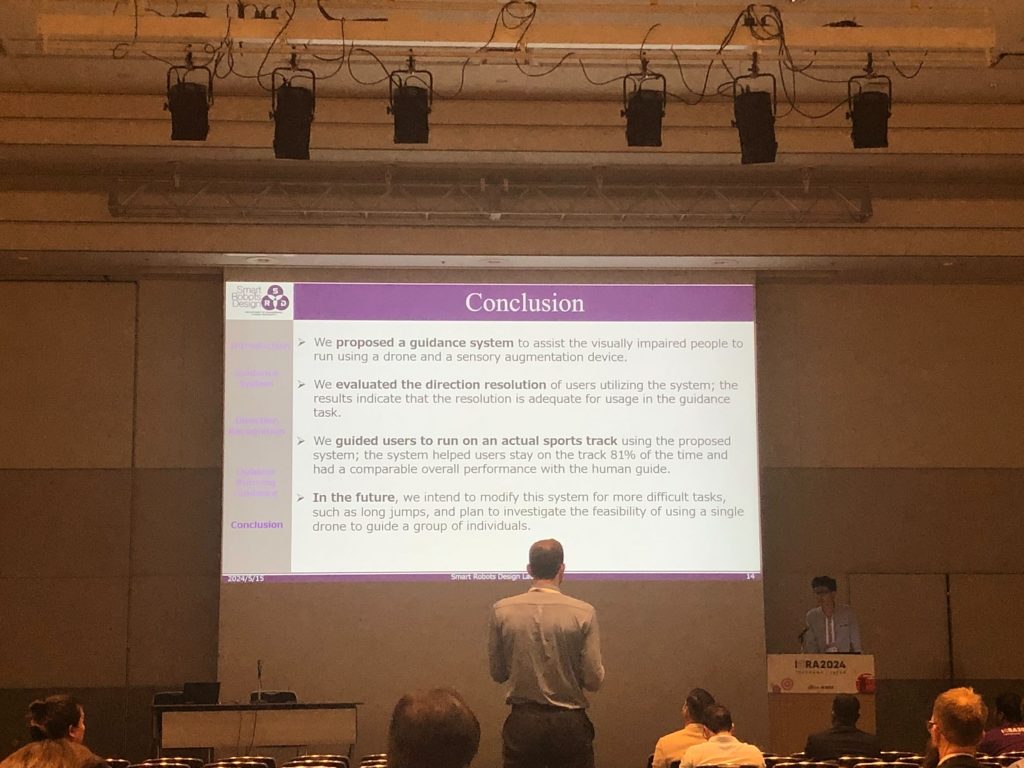
WeBT13-AX.2 Running Guidance for Visually Impaired People Using Sensory Augmentation Technology Based Robotic System
- Liao, Zhenyu(東北大学)
- Salazar Luces, Jose Victorio(東北大学)
- Ravankar, Ankit A.(東北大学)
- Hirata, Yasuhisa(東北大学)

ICRA EXPO
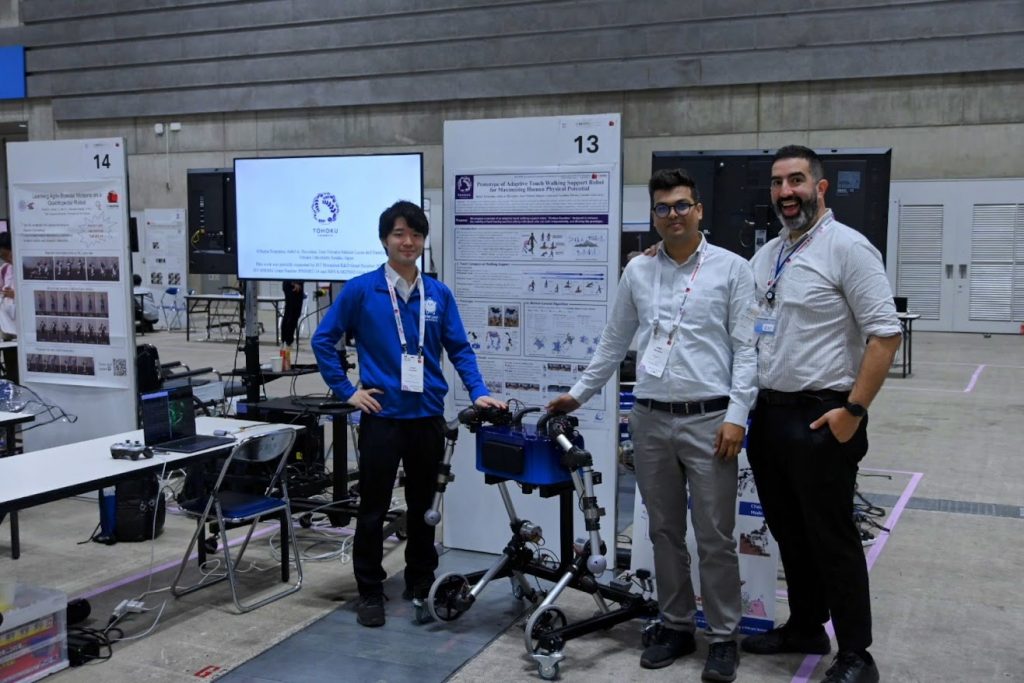
TuE-EX.13 Prototype of Adaptive Touch Walking Support Robot for Maximizing Human Physical Potential
- Terayama, Junya(東北大学)
- Ravankar, Ankit A.(東北大学)
- Salazar Luces, Jose Victorio(東北大学)
- Hirata, Yasuhisa(東北大学)
TuE-EX.11 RENKEI: Connecting Sleep and Assistive Robotics for Elderly Care
- Breuss, Alexander(ETH Zurich)
- Manríquez-Cisterna, Ricardo(東北大学)
- Gnarra, Oriella(ETH Zurich)
- Fujs, Manuel(Sensory-Motor Systems Lab, Institute of Robotics and Intelligent Systems, ETH Zurich)
- Peña Queralta, Jorge(ETH Zürich)
- Ejtehadi, Mehdi(ETH Zürich)
- Ravankar, Ankit A.(東北大学)
- Salazar Luces, Jose Victorio(東北大学)
- Paez Granados, Diego(ETH Zurich)
- Hirata, Yasuhisa(東北大学)
- Riener, Robert(ETH Zürich)

WeE-EX.16 A Stand-Assist Care Robot for Enhancing Senior Mobility
- Manríquez-Cisterna, Ricardo(東北大学)
- Ravankar, Ankit A.(東北大学)
- Salazar Luces, Jose Victorio(東北大学)
- Hatsukari, Takuro(東北大学)
- Hirata, Yasuhisa(東北大学)
ThE-EX.4 Office Robot with Health Sensing Functions
- Yamamoto, Hana (東北大学)
- Hanada, Hiroyasu (東北大学)
- Ravankar, Ankit A. (東北大学)
- Salazar Luces, Jose Victorio (東北大学)
- Motoe, Masashige (東北大学)
- Hirata, Yasuhisa (東北大学)
- Ohta, Koichi(三井不動産株式会社)
- Minoru, Nishida(三井不動産株式会社)
- Maekawa, Makiyo(三井不動産株式会社)
ThE-EX.20 Adaptive Speed Control of Treadmill Device for Enhanced Exercise in Virtual and Mixed Reality Experiences
- Manríquez-Cisterna, Ricardo (東北大学)
- Breuss, Alexander(ETH Zurich)
- Gnarra, Oriella(ETH Zurich)
- Peña Queralta, Jorge(ETH Zurich)
- Ravankar, Ankit A. (東北大学)
- Salazar Luces, Jose Victorio (東北大学)
- Paez Granados, Diego Felipe(ETH Zurich)
- Riener, Robert(ETH Zurich)
- Hirata, Yasuhisa (東北大学)


LATE BREAKING RESULTS
WeBL-EX.1 Tailoring Indoor Search Strategies: The Role of User Preferences in Multi-Target Navigation
- Chikhalikar, Akash(東北大学)
- Ravankar, Ankit A.(東北大学)
- Salazar Luces, Jose Victorio(東北大学)
- Hirata, Yasuhisa(東北大学)
WeBL-EX.25 Failure Recovery of Robotic Manipulation on Deformable Objects: Learning from Human-Guided Operation
- He, Weizan(東北大学)
- Chen, Dayuan(東北大学)
- Zhang, Yukuan(東北大学)
- Petrilli-Barceló, Alberto Elías(東北大学)
- Salazar Luces, Jose Victorio(東北大学)
- Hirata, Yasuhisa(東北大学)
ThAL-EX.17 Pedestrian Trajectory Prediction with Pose Estimation and Monte Carlo Dropout
- Tadano, Shunya(東北大学)
- Tamura, Yusuke(東北大学)
- Hirata, Yasuhisa(東北大学)
ThAL-EX.18 An Enhanced Shopping Cart Guidance System for Visually Impaired Users with Passive Control Interface
- Shi, Zhan(東北大学)
- Tamura, Yusuke(東北大学)
- Liao, Zhenyu(東北大学)
- He, Weizan(東北大学)
- Hirata, Yasuhisa(東北大学)
Keynote
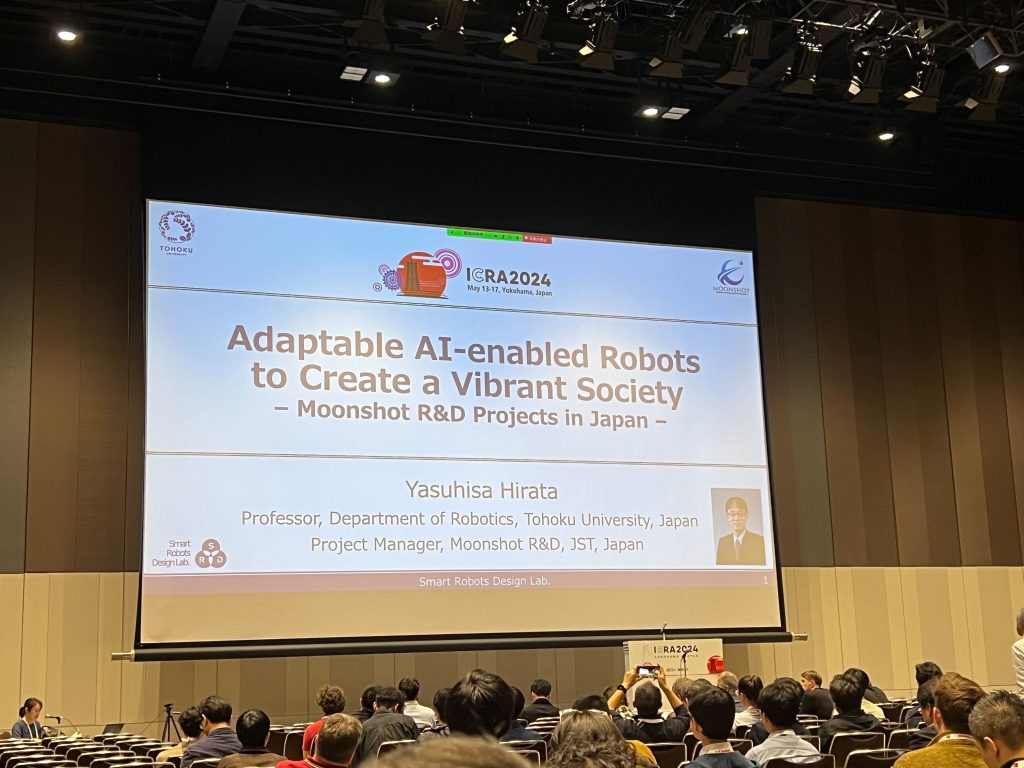
TuKN5-NT.1 Adaptable AI-Enabled Robots to Create a Vibrant Society - Moonshot R&D Projects in Japan -
- Hirata, Yasuhisa(東北大学)