ROBOMECH2025
2025年6月4日(水)~6月7日(土)に山形ビッグウィングで開催されましたロボティクス・メカトロニクス 講演会 2025(ROBOMECH2025)にて、当研究室より6件の発表を行いました。
各発表題目は以下の通りです。
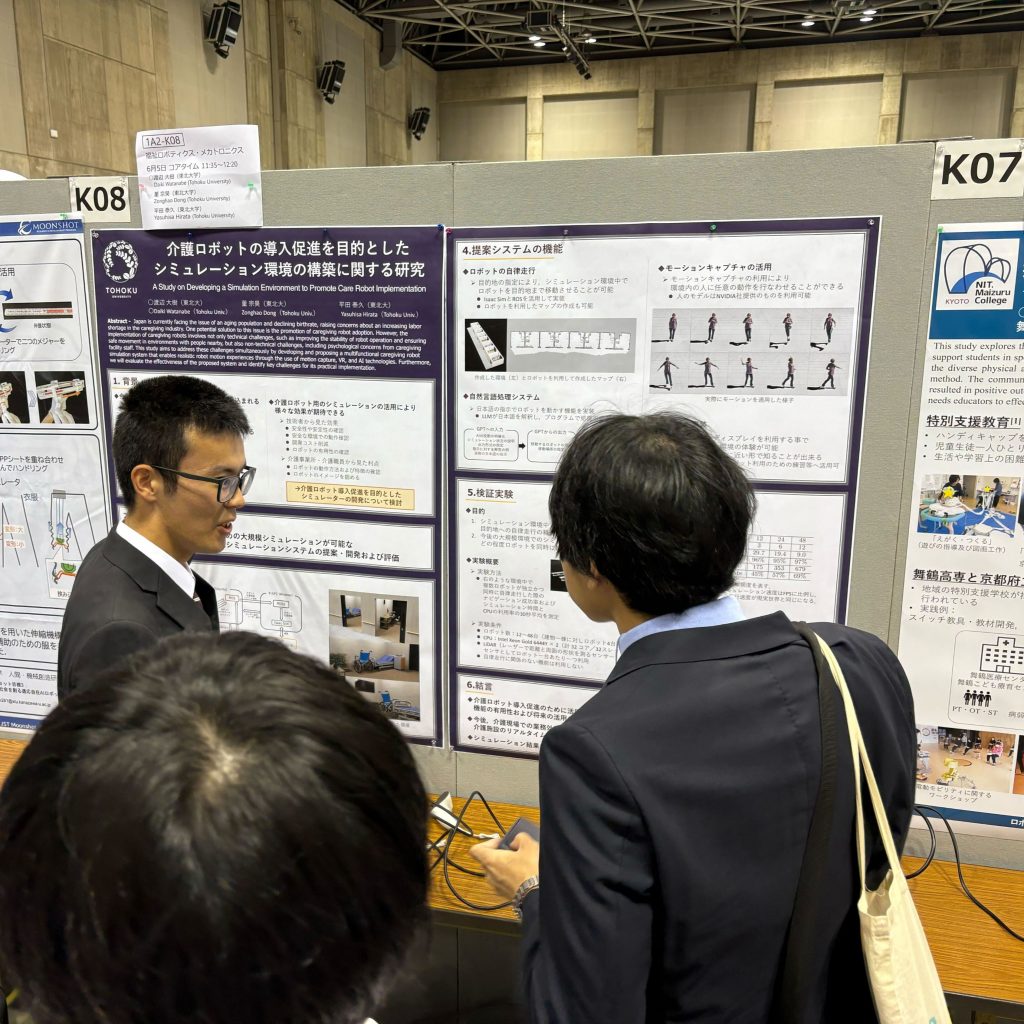
1A2-K08 介護ロボットの導入促進を目的としたシミュレーション環境の構築に関する研究
- 渡辺大樹(東北大)
- 董宗昊(東北大)
- 平田泰久(東北大)
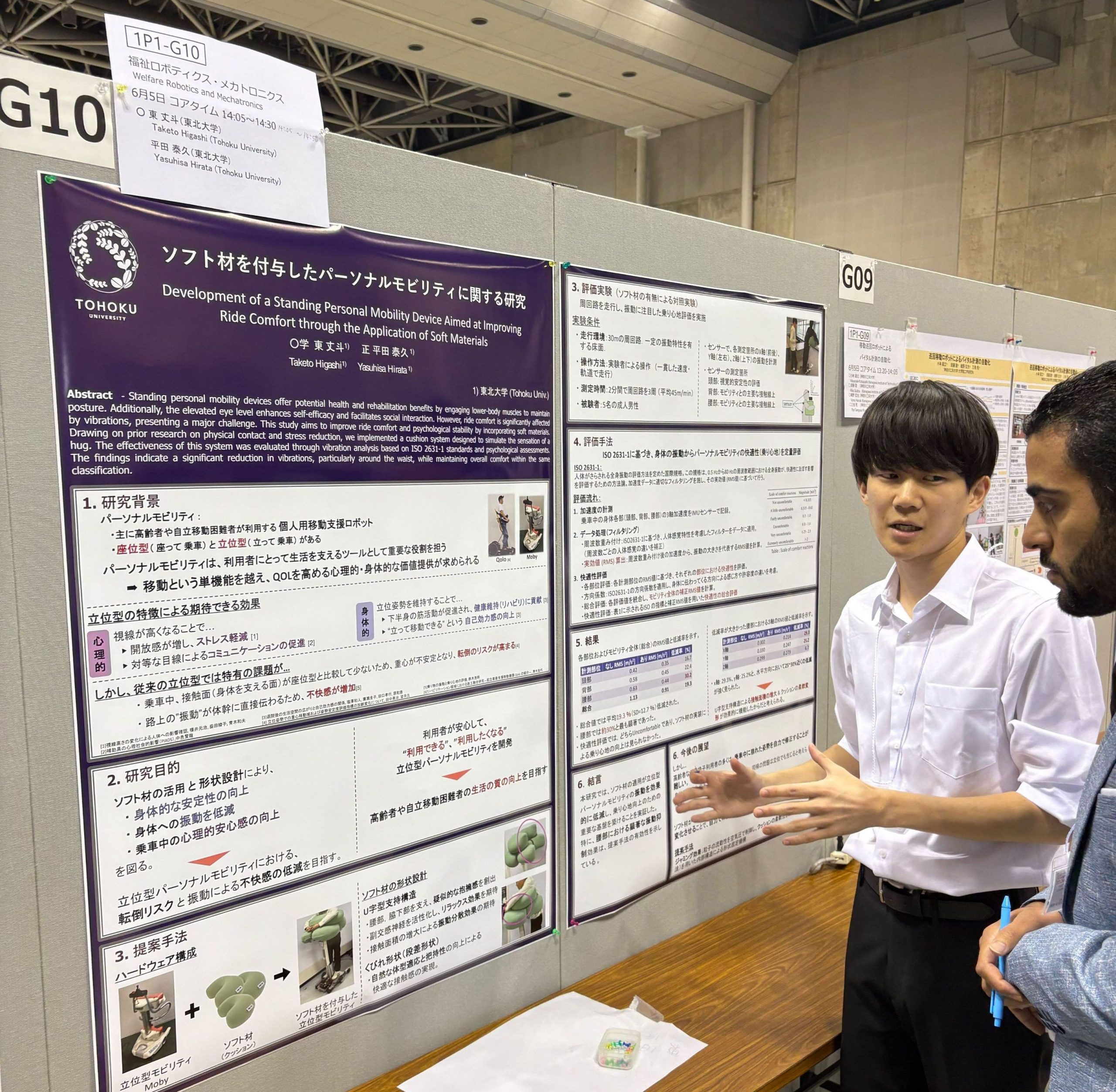
1P1-G10 ソフト材適用のによる乗り心地向上を目指した立位型パーソナルモビリティの開発
- 東丈斗(東北大)
- 平田泰久(東北大)
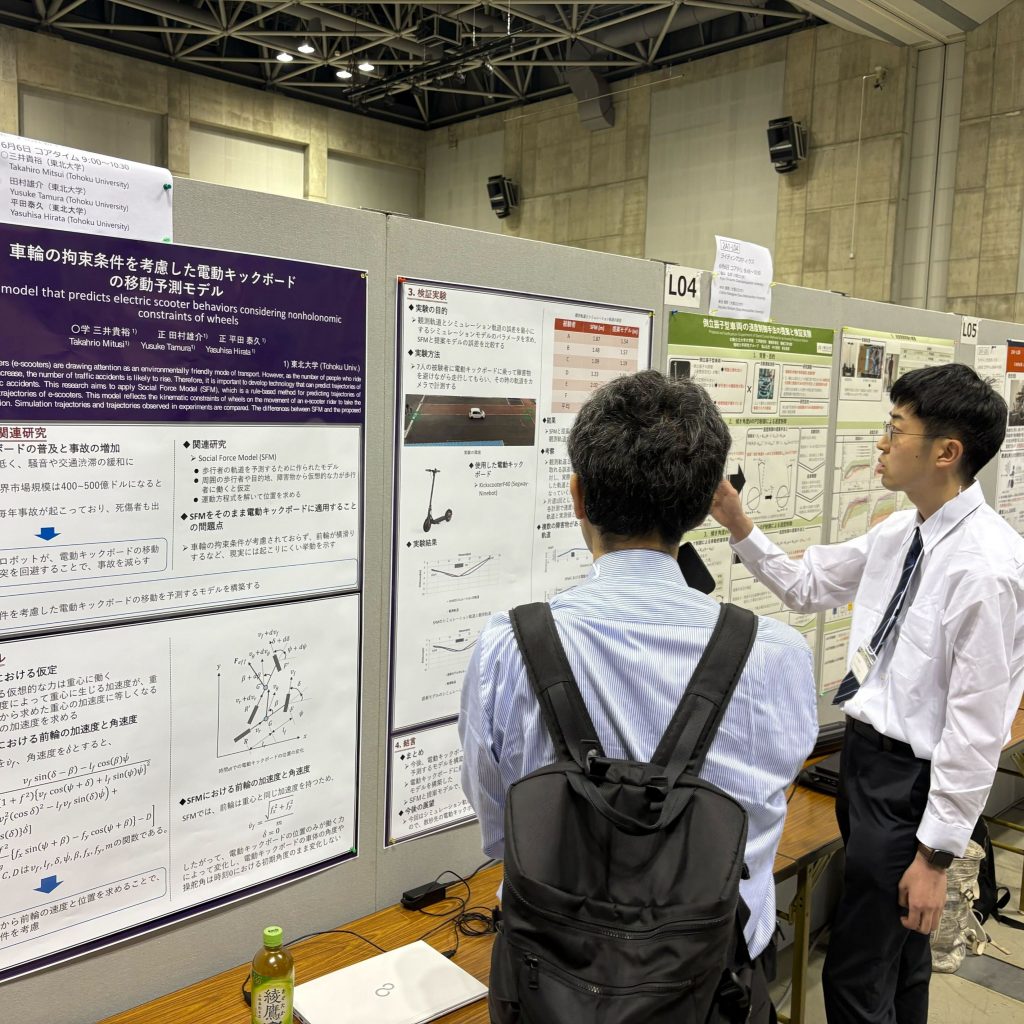
2A1-L03 車輪の拘束条件を考慮した電動キックボードの移動予測モデル -電動キックボードの運動学モデルの構築-
- 三井貴裕(東北大)
- 田村雄介(東北大)
- 平田泰久(東北大)
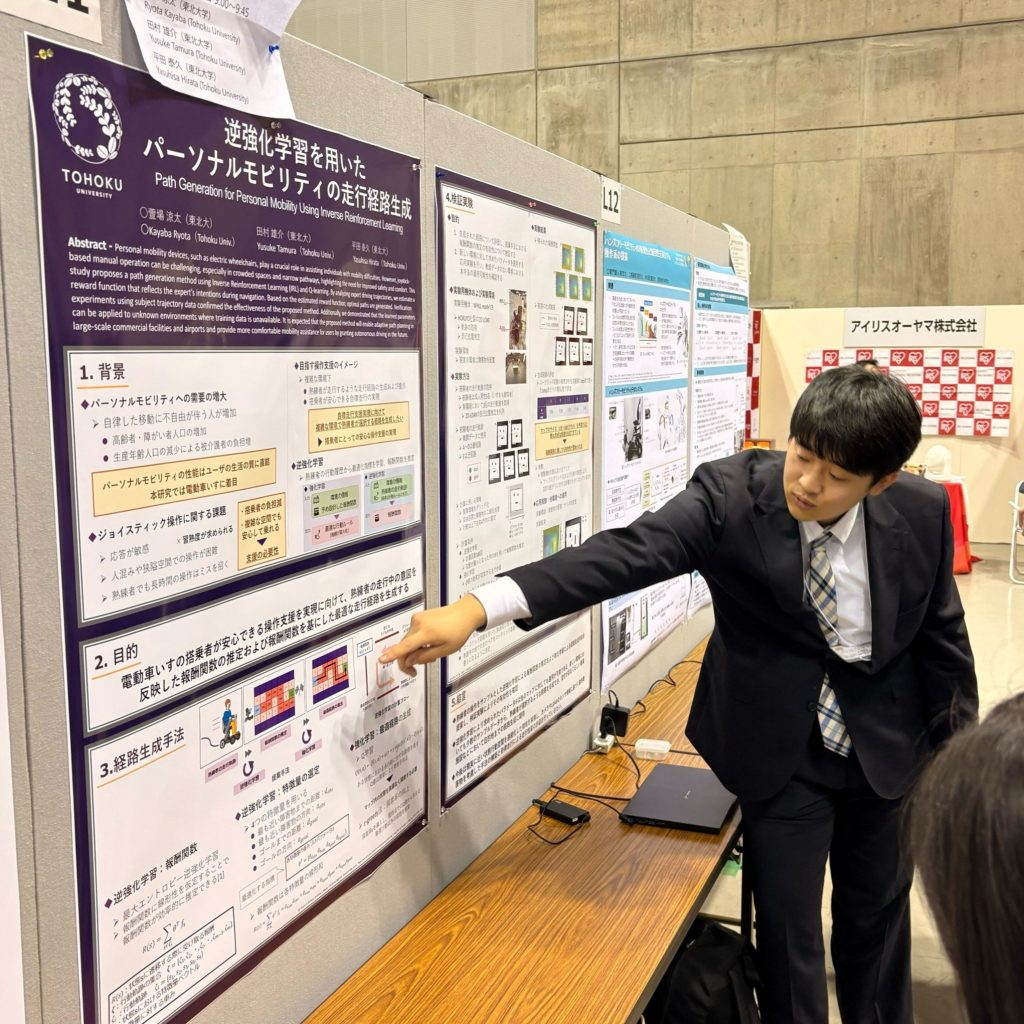
2A1-L11 逆強化学習を用いたパーソナルモビリティの走行経路生成
- 萱場涼太(東北大)
- 田村雄介(東北大)
- 平田泰久(東北大)
2P1-E05 歩行者の注意状態を考慮したコストマップ生成による移動ロボットの衝突回避
- 只野峻也(東北大)
- 田村雄介(東北大)
- 平田泰久(東北大)
2P1-L04 検索拡張生成(RAG)を用いた大規模言語モデルによる工場内ロボットの動作計画
- 山本周(東北大)
- ラワンカル・アンキット(東北大)
- サラザル・ホセ(東北大)
- 平田泰久(東北大)
2P1-M03 大規模言語モデルを用いた自動車製造工場内ロボットのタスク計画
- 津島陽介(東北大)
- 山本周(東北大)
- ラワンカル・アンキット(東北大)
- サラザル・ホセ(東北大)
- 平田泰久(東北大)


